Inglês
Inglês  Espanhol
Espanhol 
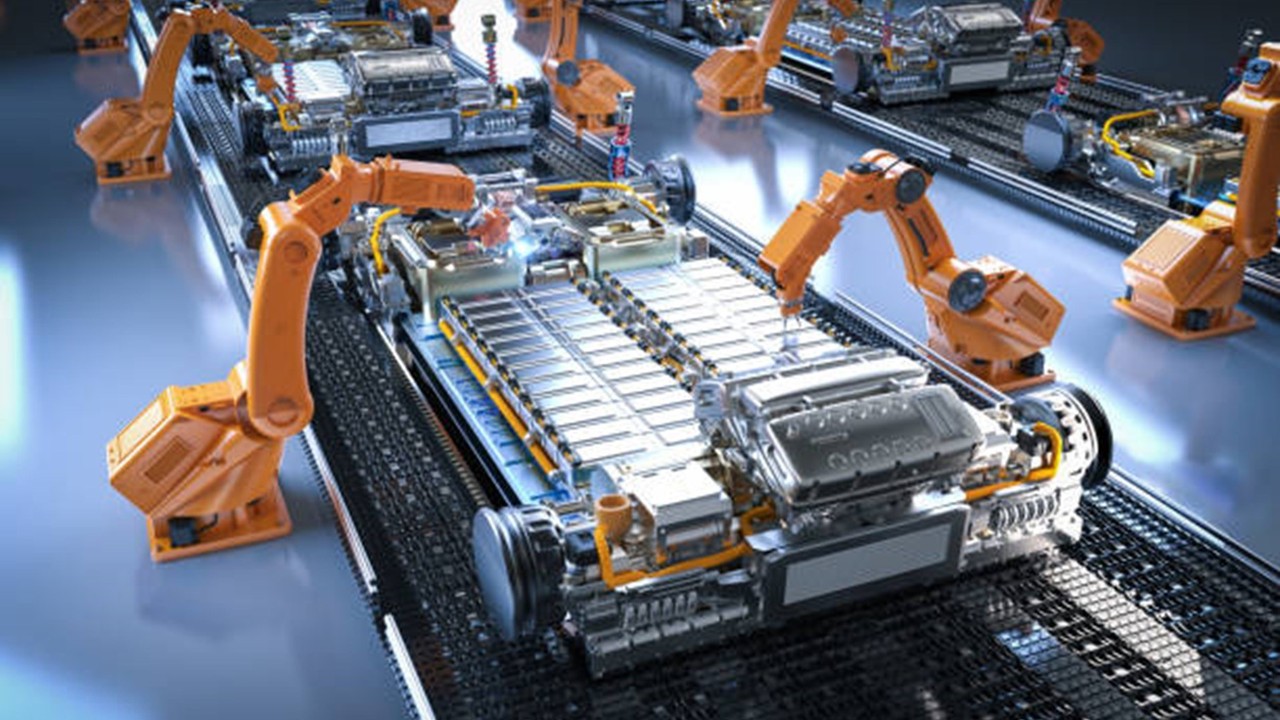
Trabalhadores em Shenzhen usam realidade virtual e sensores corporais para controlar robôs humanoides, em um processo que transforma gestos humanos em dados de treinamento para máquinas usadas em fábricas, lojas e ambientes domésticos simulados, enquanto empresas chinesas avançam na robótica física.
Em Shenzhen, no sul da China, trabalhadores estão usando óculos de realidade virtual, controles manuais e sensores corporais para comandar robôs humanoides à distância em tarefas que simulam rotinas de lojas, fábricas e ambientes domésticos.
Cada movimento feito pelo operador vira dado para treinar sistemas de inteligência artificial física, área que busca ensinar máquinas a lidar com objetos, superfícies, equilíbrio, força e situações do mundo real.
A operação foi descrita pela WIRED em reportagem publicada em 17 de junho de 2026, após visita à IO-AI Tech, startup chinesa dedicada a sistemas de teleoperação e coleta de dados para robôs humanoides.
-
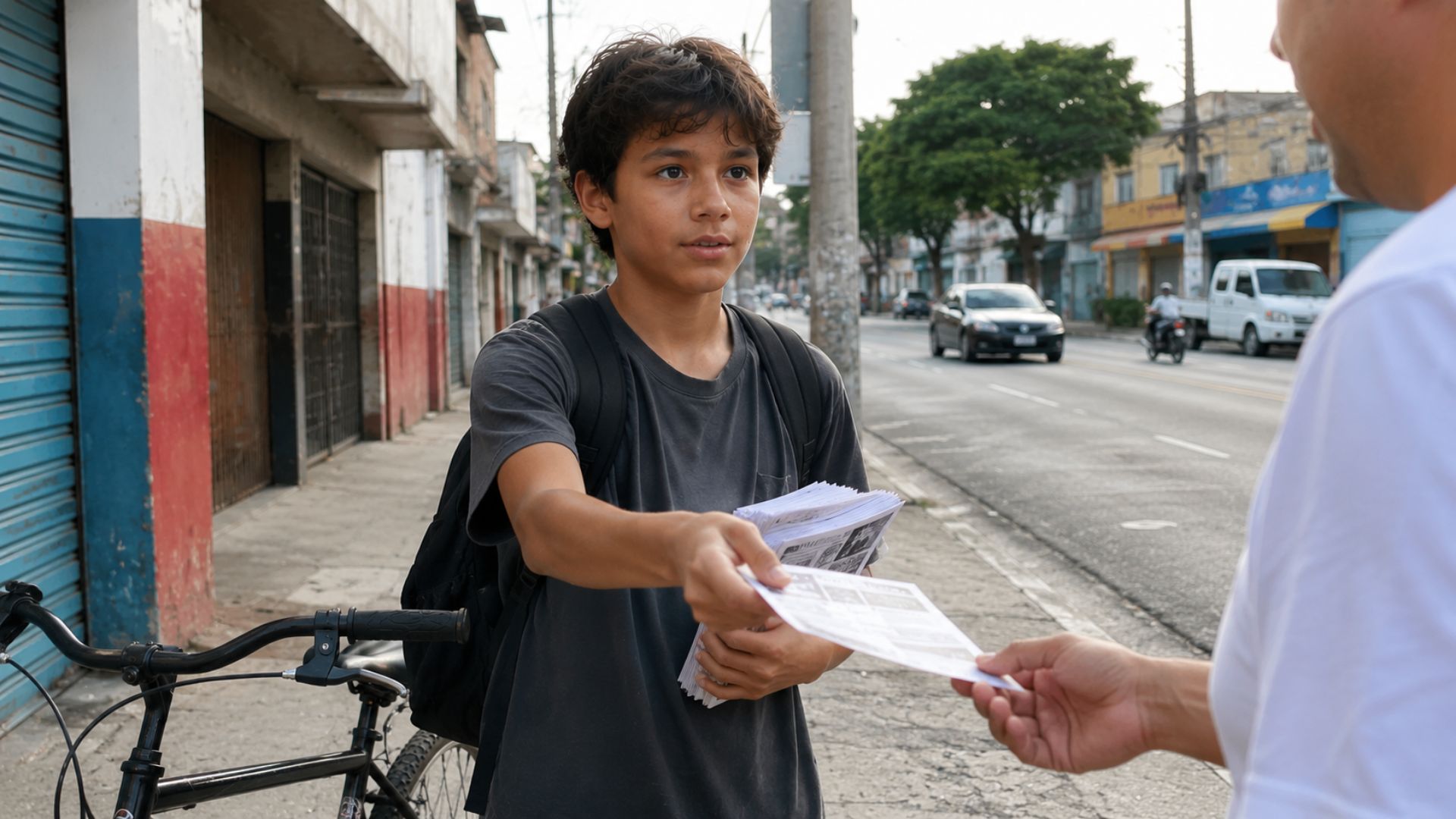
Empreendedor que começou aos 13 anos em São Paulo distribuindo panfletos de bike, pagava colegas para ajudar, lavava copos aos fins de semana e hoje comanda um complexo gastronômico de 4 mil m² na Zona Leste

-
Úrsula Romão, aluna de 12 anos da rede municipal de Alagoas, cresceu resolvendo desafios de matemática em casa, conquistou duas medalhas de ouro na OBMEP e agora mira estudar no IMPA Tech, um dos centros mais disputados de matemática e tecnologia do Brasil
-
Ímã de mais de 360 quilos, criado para uma máquina de cirurgia cardíaca e avaliado em cerca de US$ 100 mil, é lançado no mar durante pescaria magnética e retira do fundo uma espingarda encurtada com o número de série raspado

-
Maior draga mecânica do Hemisfério Ocidental retira quase 80 metros cúbicos de lama a cada ciclo, mede 77 metros e trabalha dia e noite para impedir que gigantescos navios fiquem presos no Canal de Houston





Nesse modelo, o trabalhador não apenas executa uma tarefa por meio da máquina, mas também ajuda a formar bases de dados usadas para aperfeiçoar a autonomia de futuros sistemas robóticos.
Como a teleoperação transforma gestos humanos em dados
Para controlar o robô, o operador veste um headset, segura controles ou utiliza luvas de rastreamento, passando a enxergar o ambiente pela perspectiva da máquina enquanto movimenta braços, mãos e pernas.
A partir dessa visão em primeira pessoa, ele consegue pegar itens, organizar prateleiras, manipular objetos e repetir movimentos em cenários montados justamente para aproximar o treinamento de situações reais.
Segundo a IO-AI Tech, a plataforma TeleXperience permite controlar diferentes configurações de robôs e coletar dados reais de alta precisão para treinar humanoides, braços robóticos e mãos mecânicas.
Mais do que comando remoto, a tecnologia registra informações sobre visão, força, alcance, postura e reação dos objetos, elementos necessários para que a inteligência artificial aprenda com experiências físicas.
Em uma demonstração relatada pela WIRED, operadores controlavam robôs humanoides da Unitree dentro de um espaço que simulava um apartamento, com móveis, cabides e objetos usados no cotidiano.
Enquanto uma pessoa caminhava e movia o corpo, a máquina acompanhava os gestos e executava ações como retirar uma peça de roupa de um cabide e dobrá-la.
Por que dobrar roupas ainda é difícil para robôs
Tarefas simples para humanos, como dobrar uma camiseta ou pegar uma caixa na prateleira, exigem uma sequência de ajustes que robôs ainda precisam aprender com precisão.
Nessas atividades, a máquina deve calcular força, interpretar distância, manter equilíbrio, corrigir postura e adaptar o movimento quando o objeto muda de posição ou reage de forma inesperada.
Objetos flexíveis tornam o processo ainda mais complexo, já que tecidos se dobram, escapam, criam vincos e mudam de forma a cada contato com as mãos mecânicas.
Por essa razão, a presença do operador ajuda a reduzir erros durante o treinamento, pois ele corrige movimentos em tempo real e guia a máquina em situações difíceis de prever.
A diferença entre o corpo humano e o corpo robótico também exige ajustes constantes, porque altura, peso, alcance e equilíbrio nem sempre coincidem entre quem comanda e quem executa.
De acordo com a WIRED, os sistemas da startup precisam combinar comando humano com algum grau de autonomia para adaptar gestos a robôs de formatos, tamanhos e pesos diferentes.
Inteligência artificial física depende de experiências reais
Ao contrário de modelos digitais treinados com grandes volumes de textos, imagens e vídeos, robôs humanoides precisam de dados produzidos durante interações diretas com o ambiente.
Para uma máquina física, reconhecer visualmente uma caixa ou uma camiseta não basta, porque a tarefa também exige saber onde tocar, quanta força aplicar e como reagir ao contato.
É nesse ponto que o trabalhador passa a ocupar uma função diferente da operação industrial tradicional, já que seu gesto vira parte do processo de aprendizagem do sistema.
Além de conduzir a máquina em uma tarefa imediata, o operador produz registros que podem ser reaproveitados no desenvolvimento de robôs mais autônomos e menos dependentes de intervenção humana.
A IO-AI Tech também apresenta a SenseXperience, voltada à captura de dados humanos no mundo real, e a EmbodiFlow, destinada à coleta, anotação, visualização e pós-processamento de dados multimodais.
Essas ferramentas indicam que o avanço dos humanoides depende não apenas de motores e sensores, mas de grandes volumes de exemplos físicos organizados para treinamento de inteligência artificial incorporada.
Shenzhen concentra robótica, sensores e protótipos
A escolha de Shenzhen favorece esse tipo de experimento porque a cidade reúne fabricantes, fornecedores de componentes, empresas de hardware e startups capazes de ajustar protótipos com rapidez.
Nesse ecossistema industrial, peças, sensores e estruturas podem ser modificados em ciclos curtos, o que facilita a integração da teleoperação com diferentes modelos de robôs.
A WIRED relata que a IO-AI Tech trabalha com fabricantes locais interessados em automatizar etapas manuais, incluindo atividades ligadas ao setor de confecção e à manipulação de peças.
Entre os exemplos citados está a Jack Sewing Machines, empresa chinesa de equipamentos para costura, envolvida em projeto para treinar robôs de dois braços em tarefas como passar camisas.
No varejo, a tecnologia também foi testada com uma rede chinesa de lojas de conveniência, em uma operação na qual uma pessoa usava headset e controles para pegar caixas de medicamentos.
Esse tipo de demonstração combina execução prática e coleta de dados, permitindo registrar posição de objetos, alcance dos braços, visão do ambiente e movimentos necessários para concluir a tarefa.
Robôs ainda dependem de operadores humanos
Apesar do objetivo de ampliar a autonomia, a teleoperação mostra que muitos robôs humanoides ainda precisam de supervisão humana para atuar em ambientes complexos e pouco previsíveis.
Fábricas, lojas e casas foram projetadas para corpos humanos, com corredores, prateleiras, móveis e ferramentas que exigem mobilidade, percepção e adaptação constante.
Por isso, os humanoides atraem interesse de empresas que buscam máquinas capazes de trabalhar em espaços já existentes, sem exigir uma reconstrução completa do ambiente ao redor.
Ainda assim, o caminho até a autonomia passa por milhões de gestos capturados, corrigidos e convertidos em dados, com trabalhadores servindo como ponte entre a máquina atual e sistemas futuros.
Nessa etapa da robótica física, o valor do trabalho não está apenas na tarefa realizada no momento, mas também no conhecimento incorporado aos registros que ajudam a treinar novas gerações de máquinas.