
 Inglês
Inglês  Espanhol
Espanhol 
Nova técnica de impressão 3D desenvolvida em Harvard cria filamentos macios capazes de mudar de forma com temperatura, aproximando a robótica mole de estruturas inspiradas em músculos biológicos e materiais programáveis.
Pesquisadores da Escola de Engenharia e Ciências Aplicadas John A. Paulson, da Universidade Harvard, desenvolveram uma técnica de impressão 3D capaz de produzir filamentos macios que se dobram, torcem, expandem ou contraem quando aquecidos ou resfriados.
Segundo a instituição, o método permite organizar materiais ativos e passivos dentro de uma mesma estrutura, de modo que parte do movimento seja definida já na etapa de fabricação.
A pesquisa foi publicada na revista Proceedings of the National Academy of Sciences e descreve uma estratégia chamada impressão 3D rotacional multimaterial.
-
Universidade dos EUA realiza cirurgias com robôs humanoides controlados à distância

-
Menino de 12 anos da rede municipal de Canoas conquistou ouro na Olimpíada Brasileira de Matemática, levou a primeira medalha nacional da história da escola e se destacou em uma competição que reuniu mais de 18 milhões de estudantes, mostrando como a educação pública pode revelar talentos escondidos no Brasil
-
Por que uma empresa que já faturava US$ 1 milhão decidiu mudar completamente sua estratégia? A resposta começa com garrafas usadas, minhocas e uma decisão inesperada

-
Onde quase nunca chove, moradores penduraram redes gigantes nas montanhas do deserto e começaram a ‘pescar’ água potável da neblina: as telas chegam a coletar milhares de litros por dia direto do nevoeiro




O processo usa um bico de impressão que gira enquanto deposita diferentes materiais, o que permite controlar a composição interna de filamentos semelhantes a fibras.
De acordo com os autores, essa arquitetura influencia a forma como cada peça responde a estímulos térmicos.
Impressão 3D e movimentos inspirados na natureza
A proposta se baseia em estruturas flexíveis observadas em organismos vivos.
No artigo, os pesquisadores citam exemplos como proteínas, gavinhas de plantas, tentáculos de polvos e trombas de elefantes, que podem se curvar, enrolar ou assumir diferentes formas conforme sua organização interna e sua função biológica.
Na robótica, reproduzir esse tipo de movimento exige soluções que combinem controle, deformação e resposta a estímulos.
Robôs convencionais usam motores elétricos, sistemas pneumáticos, componentes hidráulicos e articulações mecânicas para executar tarefas com precisão.
Esses recursos são amplamente empregados em aplicações industriais, mas nem sempre oferecem a flexibilidade necessária para manipular objetos frágeis ou operar em ambientes menos padronizados.
A robótica mole busca outro caminho.
Em vez de depender apenas de peças rígidas conectadas por juntas, essa área investiga materiais capazes de mudar de forma, distribuir forças e se adaptar ao contato com superfícies irregulares.
Essa abordagem é estudada para aplicações como garras flexíveis, dispositivos médicos, sistemas de filtragem, estruturas reconfiguráveis e componentes robóticos que precisam interagir com objetos de diferentes tamanhos e formatos.
Filamentos artificiais combinam materiais ativos e passivos
No estudo conduzido em Harvard, os pesquisadores combinaram dois tipos de elastômeros, materiais flexíveis com comportamento semelhante ao de borrachas.
Um deles é ativo: trata-se de um elastômero de cristal líquido, conhecido pela sigla LCE, que se contrai em uma direção preferencial quando é submetido a determinada variação de temperatura.
O outro é passivo e funciona como uma parte que resiste à deformação.
Quando os dois materiais são impressos lado a lado, a diferença entre suas respostas físicas produz movimento.
A parte ativa tende a contrair, enquanto a parte passiva mantém maior estabilidade.
Essa combinação faz o filamento se curvar, torcer, enrolar ou se deslocar conforme a distribuição interna definida durante a impressão.
O bico rotativo usado no processo acrescenta uma segunda variável de controle.
À medida que imprime o filamento, ele orienta o arranjo molecular do elastômero de cristal líquido em padrões helicoidais.
Com isso, os pesquisadores conseguem alterar a direção e a intensidade da curvatura e da torção em diferentes pontos da estrutura.
Essa característica diferencia a técnica de abordagens baseadas apenas no formato externo da peça.
Nesse caso, o comportamento mecânico é determinado pela combinação entre geometria, posição dos materiais e alinhamento molecular.
Segundo os autores, a programação do movimento ocorre no próprio filamento, sem necessidade de adicionar engrenagens, dobradiças rígidas ou mecanismos montados depois da impressão.
Robótica mole testa garras, filtros e estruturas deformáveis
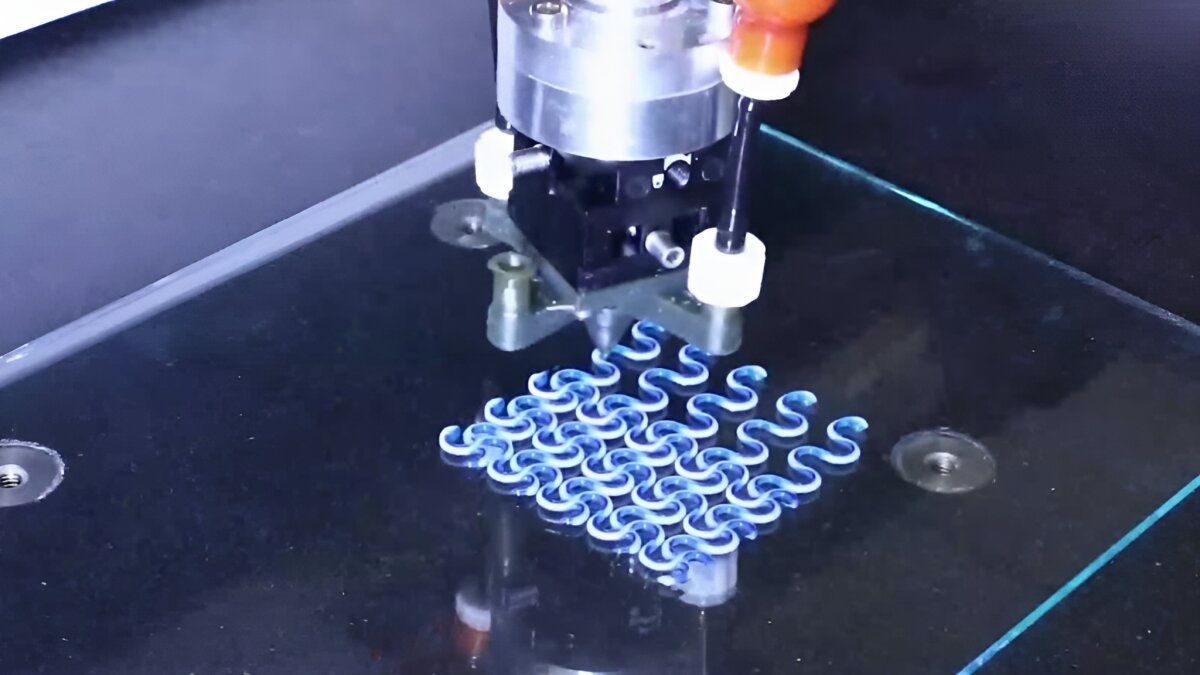
A equipe testou filamentos ondulados e redes planas formadas por pequenas unidades repetidas.
Em algumas demonstrações, estruturas visualmente semelhantes apresentaram comportamentos diferentes quando aquecidas.
Algumas se contraíram, enquanto outras se expandiram, dependendo da posição do material ativo dentro de cada filamento.
Também foram produzidas redes capazes de sair de uma forma plana e assumir configurações tridimensionais, como estruturas semelhantes a domos.
Em outra demonstração, os pesquisadores apresentaram filtros ativos que alteravam a abertura de seus poros conforme a temperatura.
Quando aquecidos, esses filtros permitiam a passagem de partículas; ao resfriar, voltavam a reduzir a abertura.
O estudo ainda descreve garras macias fabricadas com a mesma lógica.
Essas estruturas foram projetadas para descer sobre objetos, se fechar ao redor deles, levantar o item e liberá-lo depois.
Conforme o comunicado de Harvard, a demonstração indica possíveis usos em manipulação robótica, especialmente em sistemas que precisam combinar deformação e contato com superfícies variadas.
Esses resultados permanecem em ambiente experimental.
Não há indicação, nas fontes consultadas, de que a técnica esteja pronta para substituir motores, atuadores industriais ou sistemas robóticos usados em aplicações de alta potência.
O que o trabalho apresenta é uma forma de fabricar materiais com resposta programada, o que pode servir de base para novas pesquisas em robótica mole e estruturas adaptativas.

Músculos artificiais seguem como desafio da robótica
A ideia de desenvolver músculos artificiais para robôs é estudada há anos.
A área inclui soluções pneumáticas, ligas metálicas com memória de forma, polímeros acionados por eletricidade, materiais magnéticos e sistemas baseados em cabos que se aproximam do funcionamento de tendões.
Cada abordagem atende a demandas específicas, mas também apresenta limitações técnicas conforme o tipo de uso.
Sistemas pneumáticos, por exemplo, podem depender de compressores, válvulas e mangueiras.
Alguns polímeros exigem tensões elétricas elevadas.
Outros materiais respondem de forma mais lenta, demandam aquecimento ou impõem restrições de fabricação.
Em muitos casos, o atuador responsável pelo movimento precisa ser integrado a uma estrutura mecânica mais ampla para funcionar.
A técnica descrita por Harvard tenta reduzir parte dessa dependência ao incorporar o comportamento de deformação no material impresso.
Ainda assim, o termo “músculo” deve ser entendido como uma comparação funcional, não como equivalência ao tecido humano.
Músculos biológicos envolvem fibras, sinais nervosos, irrigação sanguínea, metabolismo celular e controle coordenado pelo sistema nervoso.
No caso dos filamentos impressos, o movimento ocorre pela resposta de materiais sintéticos a mudanças de temperatura.
A semelhança está na capacidade de produzir contração, torção e curvatura, mas o mecanismo físico é diferente daquele observado em organismos vivos.
Tecnologia ainda depende de testes fora do laboratório
O acionamento térmico é uma das principais limitações apontadas pela própria natureza do experimento.
Como o movimento depende de aquecimento e resfriamento, fatores como tempo de resposta, consumo de energia e controle de temperatura precisam ser considerados antes de qualquer aplicação fora do laboratório.
Outro ponto é a escala de uso.
As demonstrações mostram que a impressão 3D rotacional multimaterial pode produzir filamentos e redes com movimentos programáveis, mas não estabelecem prazo para aplicação comercial.
Também não há, nas fontes consultadas, dados suficientes para afirmar como a técnica se comportaria em operação contínua, em ambientes externos ou em sistemas robóticos submetidos a cargas maiores.
Os autores apontam possíveis aplicações em garras robóticas adaptativas, filtros ativos, dispositivos biomédicos, válvulas reconfiguráveis e estruturas que mudam de forma sob demanda.
Essas possibilidades aparecem como caminhos de pesquisa, não como produtos disponíveis.
Antes disso, seriam necessários testes de durabilidade, repetição de ciclos, segurança, integração com sensores e compatibilidade com sistemas de controle.
A pesquisa se insere em uma linha de investigação que busca transferir parte do controle mecânico para o próprio material.
Em vez de depender somente de software, motores e partes articuladas, esses sistemas usam composição interna e geometria para orientar a resposta física da estrutura.
Esse tipo de desenvolvimento ajuda a explicar por que a robótica mole tem atraído interesse em laboratórios de engenharia, ciência dos materiais e bioinspiração.
Para tarefas que envolvem contato delicado, adaptação a formas variadas ou mudanças reversíveis de configuração, materiais programáveis podem oferecer alternativas aos mecanismos rígidos convencionais.
Ainda não se trata de robôs indistinguíveis de seres humanos nem de músculos artificiais equivalentes aos do corpo.
O estudo mostra, de forma mais restrita, que filamentos impressos com materiais ativos e passivos podem executar movimentos definidos pela sua arquitetura interna.







