
 Inglês
Inglês  Espanhol
Espanhol 
Desenvolvida por uma equipe de Anand Mishra, da Universidade da Virgínia Ocidental, a mão robótica foi testada em morangos e colhe a fruta torcendo o caule. O estudo saiu na Nature Communications, mas trata de um protótipo, e a precisão de quase 100% se refere à previsão do formato.
Uma mão robótica flexível, capaz de usar tato e visão para avaliar o ponto de maturação e colher frutas delicadas sem causar danos, foi desenvolvida por pesquisadores. Segundo o material, o dispositivo identifica quando a fruta está pronta e faz a colheita sem machucar o alimento, o que pode reduzir o desperdício e melhorar a eficiência no campo. A pesquisa reúne uma equipe que inclui o professor Anand Mishra, na Universidade da Virgínia Ocidental, nos Estados Unidos, e começou na Universidade Cornell.
De acordo com a reportagem, os dedos macios de silicone e poliuretano são equipados com vários sensores. Eles medem o tamanho, o formato, a cor e a firmeza da fruta antes de decidir se ela está no ponto de maturação. O sistema foi testado em morangos e remove a fruta torcendo o caule, em vez de cortar, e o estudo foi publicado na revista Nature Communications em 23 de março.
Como funciona a mão robótica que colhe frutas pelo tato
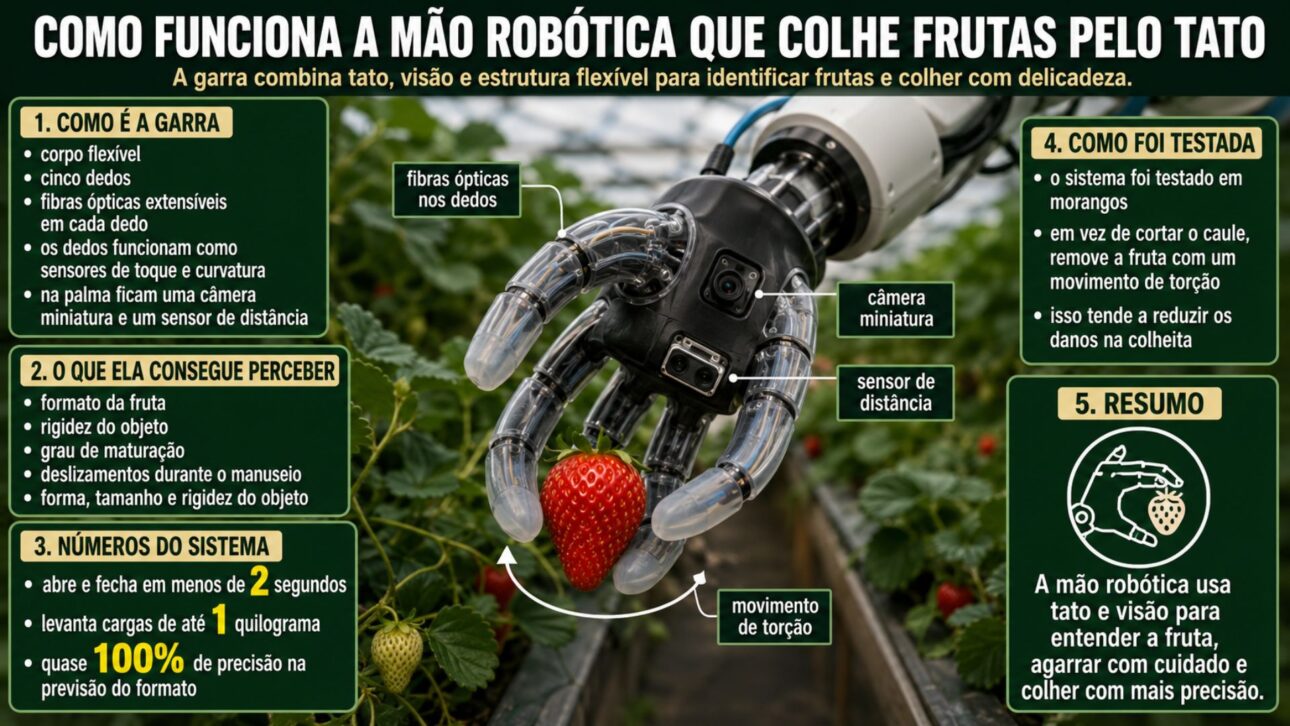
A mão robótica combina sensores de tato e de visão em um corpo flexível. Segundo o material, fibras ópticas extensíveis embutidas em cada dedo funcionam como sensores de toque e de curvatura, enquanto uma câmera em miniatura e um sensor de distância ficam na palma. A garra de cinco dedos consegue identificar o formato, a rigidez e o grau de maturação da fruta, além de perceber deslizamentos durante o manuseio.
-
Cansado com os buracos da rua, homem começa a tapá-los por conta própria e ironiza prefeitura: “me paguem em vez de impostos”. Atitude chamou a atenção e motoristas passaram a recompensá-lo com dinheiro e café

-
Centenas de pinheiros crescem tortos, todos com a mesma curva em “J” na base e apontando para a mesma direção, cercados por árvores perfeitamente retas, e quase um século depois ninguém conseguiu explicar quem, ou o quê, entortou a floresta inteira
-
Prédios na China começaram a “chorar” água contra o calor sufocante: sistema nos telhados espalha névoa ultrafina, pode reduzir a temperatura de superfície em até 8°C e viraliza como “ar-condicionado externo”, mas consumo de água limita uso em cidades mais secas

-
Pastor Alemão é reprovado como cão-guia por não largar elefante de pelúcia e curiosa cena em estação de trem viraliza





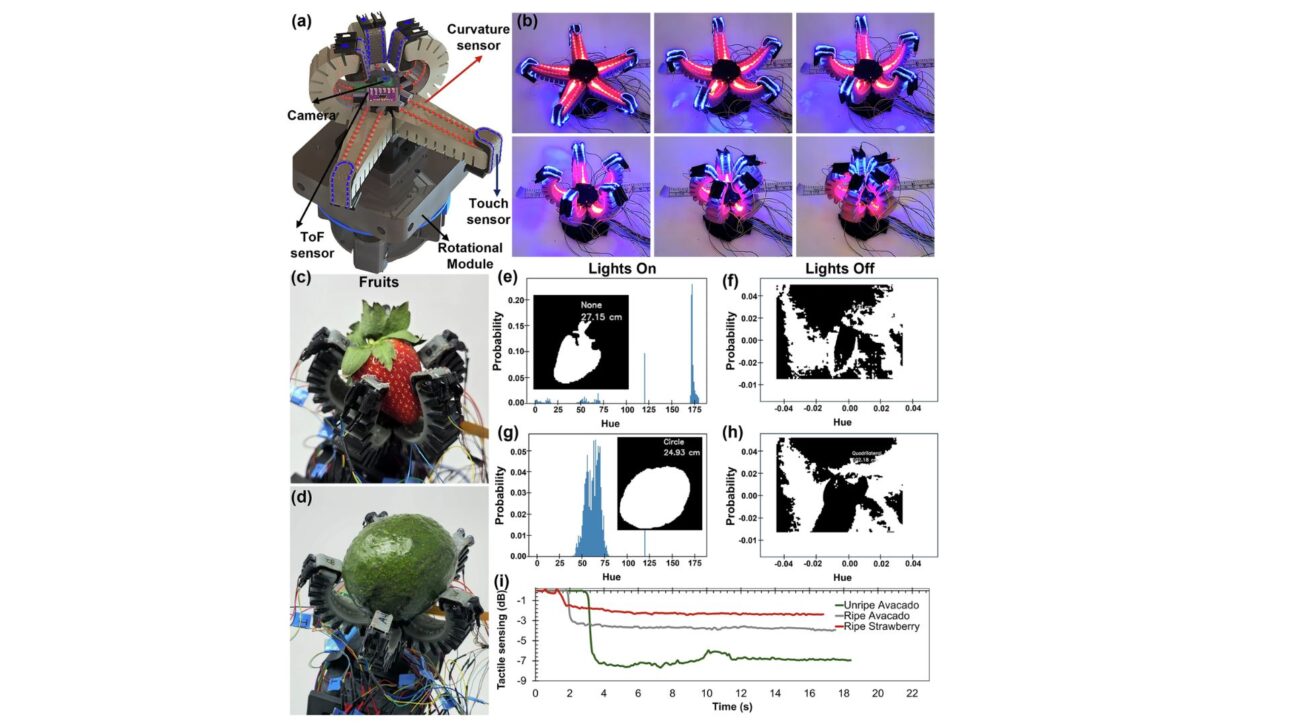
imagem: Nature
Os números relatados pela equipe ajudam a entender o alcance do dispositivo. De acordo com a reportagem, a garra abre e fecha em menos de dois segundos, levanta cargas de até um quilograma e atinge precisão de quase 100% na previsão do formato. O sistema foi testado em morangos e, em vez de cortar o caule, remove a fruta com um movimento de torção, o que tende a reduzir os danos na colheita.
O desafio de colher frutas delicadas no ponto certo
A mão robótica tenta resolver um problema antigo da agricultura. Segundo o material, colher frutas delicadas no ponto certo de maturação é difícil, porque morangos e framboesas têm uma janela de colheita estreita e se danificam com facilidade na colheita, no transporte e no armazenamento. Para a equipe, as inspeções da fruta são decisivas e, tradicionalmente, dependiam de trabalhadores humanos.
O trabalho manual, porém, enfrenta limites. De acordo com a reportagem, a equipe cita a escassez de trabalhadores, as preocupações com a saúde e as imprecisões na colheita como desafios da mão de obra humana. Robôs agrícolas já foram propostos como saída, mas muitos sistemas são feitos para estufas controladas, e não para fazendas ao ar livre, e garras rígidas tradicionais podem machucar frutas macias.
Inspiração na biologia e a precisão de quase 100%
O desenho da mão robótica vem da própria natureza. Segundo o material, a estrutura se inspira em sistemas biológicos e lembra ao mesmo tempo uma mão humana e uma estrela do mar. No laboratório de Mishra na Universidade da Virgínia Ocidental, o foco são robôs que imitam a biologia, como ele resume: “projetamos robôs macios, flexíveis e emborrachados inspirados em animais”.
A flexibilidade explica parte do resultado. De acordo com a reportagem, a estrutura maleável absorve forças de forma diferente dos robôs rígidos, o que a torna mais adequada para objetos delicados. Vale lembrar que a precisão de quase 100% citada se refere à previsão do formato da fruta, e a tecnologia tende a ser útil em frutas sem sinais visuais claros de maturação, como o abacate, em que os produtores se guiam pelo tato.
Usos além do pomar e o que ainda falta
O potencial da mão robótica não se limita à fruta. Segundo o material, a equipe aponta usos em exploração espacial, cuidados de saúde, processamento de alimentos e manipulação subaquática, e, na robótica biomédica, a união entre detecção de curvatura e tato poderia melhorar dispositivos vestíveis e de reabilitação. Os pesquisadores acreditam que materiais macios somados a sensores integrados ajudam os robôs a interagir de forma mais segura com objetos e com o ambiente.
Ainda assim, é preciso separar o que já existe do que é promessa. De acordo com a reportagem, o equipamento é um protótipo de pesquisa, testado sobretudo em morangos, e a maior parte das aplicações citadas é potencial, não produto pronto. O salto do laboratório para frutas variadas e para fazendas reais ainda precisa ser comprovado, embora o estudo já tenha sido publicado na Nature Communications.
A mão robótica criada pela equipe de Anand Mishra mostra como o cruzamento entre tato, visão e materiais flexíveis pode mudar a forma de colher frutas delicadas. Os números de laboratório impressionam, do tempo de menos de dois segundos para abrir e fechar à precisão de quase 100% na previsão do formato, e o leque de usos vai do pomar à exploração espacial. Por enquanto, porém, é um protótipo, e o teste real será levar a tecnologia do morango para outras frutas e para o campo aberto.
E você, confiaria em uma mão robótica para escolher e colher as frutas que chegam à sua mesa? Comente o que achou dessa tecnologia e troque ideias com outros leitores sobre o futuro da colheita e do combate ao desperdício de alimentos.




