
 Chinês (Simplificado)
Chinês (Simplificado)  Chinês (Tradicional)
Chinês (Tradicional)  Inglês
Inglês  Francês
Francês  Alemão
Alemão  Italiano
Italiano  Japonês
Japonês  Norueguês
Norueguês  Espanhol
Espanhol 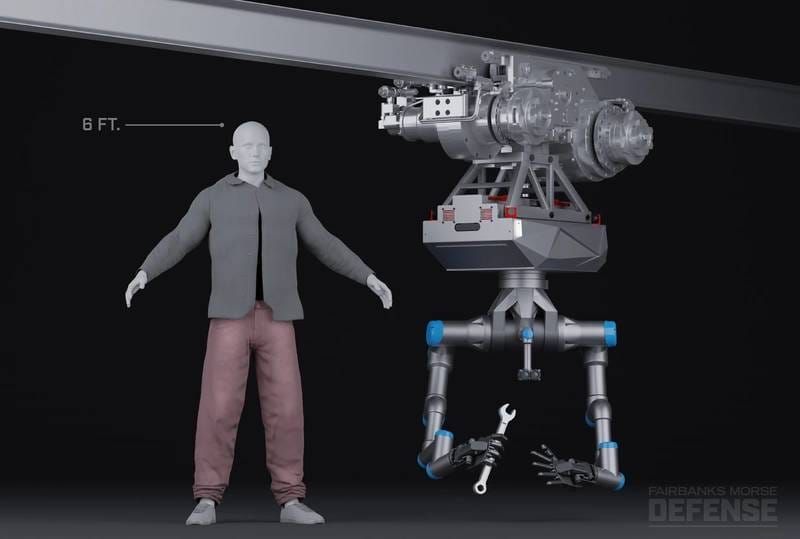
Navios autônomos levantam a questão da manutenção de emergência e rotina. Desafios incluem IA, robótica e comunicações seguras.
Os avanços tecnológicos na área da robótica estão revolucionando diversos setores da indústria, e o mercado marítimo não é uma exceção. A automação de processos e a implementação de robôs em navios autônomos estão transformando a forma como as operações são realizadas, trazendo maior eficiência e segurança para o setor. A FMD é uma das empresas que tem investido em pesquisa e desenvolvimento de robótica para sala de máquinas, visando aprimorar as práticas de manutenção e reparo de navios autônomos.
O futuro da robótica no ambiente marítimo
A equipe da FMD que Trey Taylor lidera é relativamente novo, começando em 2019 com um produto básico que analisava equipamentos de monitoramento, ‘sendo capaz de fornecer essas informações às nossas equipes técnicas para diagnóstico e também fornecer alguns dados ao cliente final para auto-avaliação’. apoiar.’ Mas isso foi apenas o começo e, em 2020, a equipe de Taylor pediu mais à equipe executiva. O resultado foi ‘um roteiro para cinco verticais de produtos nos quais estávamos interessados: IA, autonomia, robótica, capacidade de realidade mista e comunicações seguras.’
No desenvolvimento de soluções robóticas pelos trabalhos de rotina e de emergência e reparos na casa de máquinas, Taylor credita seu chefe, CEO da FMD, George Whittier, por incutir seu princípio: ‘Não mire no alvo, mire onde o alvo vai estar’.
-
Petrobras e Amazônica Energy firmam contrato pioneiro de GNL em pequena escala no Polo Urucu para levar gás natural a localidades da Região Norte e transformar demanda logística

-
COP30 em Belém reacende debate sobre petróleo na foz do Amazonas após críticas de ambientalistas e povos tradicionais

-
Cresce o apoio da população à exploração de petróleo na Margem Equatorial, aponta pesquisa
-
Petróleo da Margem Equatorial no Amapá: nova receita estatal promete financiar infraestrutura, proteger terras indígenas e impulsionar o desenvolvimento regional sustentável




Então, Taylor e sua equipe de 22 pessoas começaram a olhar mais de perto para um de seus principais clientes – a Marinha dos EUA. ‘Sabemos que a Marinha tem uma necessidade, um desejo de abastecer os recursos não tripulados em algum momento no final desta década, e o prazo que eles desejam que esses recursos sejam implantados sem intervenção é hoje de apenas 30 a 60 dias’, disse Taylor. ‘Mas a meta de longo prazo é de 180 dias, então nossa equipe começou a procurar sistemas para ajudar a Marinha a atingir essa meta. Rapidamente chegamos à conclusão de que teríamos que fazer manutenção, mas como fazemos a manutenção quando não há um humano a bordo?’ Entre no robô.
 ‘Você precisará de recursos diferentes em momentos diferentes’, disse Taylor. ‘Por exemplo, se estou fazendo algo em um motor, talvez precise ser capaz de levantar e suportar 150-200 libras; mas também posso precisar de uma manipulação muito precisa de pequenos acessórios para remover essa peça. Então provavelmente não terei um robô bípede de dois braços. Terei um robô que pode se apoiar em um trilho ou em uma antepara para esse levantamento pesado, e pode ter quatro braços, dois braços de movimento bruto que podem lidar com o levantamento pesado e, em seguida, dois braços habilidosos que estão fazendo o trabalho perfeito. movimentos de fixação.
‘Você precisará de recursos diferentes em momentos diferentes’, disse Taylor. ‘Por exemplo, se estou fazendo algo em um motor, talvez precise ser capaz de levantar e suportar 150-200 libras; mas também posso precisar de uma manipulação muito precisa de pequenos acessórios para remover essa peça. Então provavelmente não terei um robô bípede de dois braços. Terei um robô que pode se apoiar em um trilho ou em uma antepara para esse levantamento pesado, e pode ter quatro braços, dois braços de movimento bruto que podem lidar com o levantamento pesado e, em seguida, dois braços habilidosos que estão fazendo o trabalho perfeito. movimentos de fixação.
Imagem cortesia da FMD
Perspectivas da robótica marítima
Hoje, o trabalho da FMD não se concentra em uma única solução, mas em um uma série de diferentes manifestações de como a robótica da casa de máquinas irá parecer e funcionar. ‘Decidimos que uma plataforma robótica provavelmente será a abordagem correta, mas queremos ter certeza de que entendemos os problemas e entendemos os requisitos reais do produto que um robô teria que facilitar’, disse Taylor, um processo que significava compreender o roteiro de longo prazo da Marinha. Como é habitual no espaço marítimo, raramente ou nunca existe uma solução técnica de ‘tamanho único’, baseada na ampla variedade de projetos de navios. ‘Há muitos desafios importantes no trabalho em um ambiente marinho’, disse Taylor. ‘Tenho anteparas pelas quais preciso passar; Tenho espaços confinados e espaços abertos. Em alguns casos, posso querer uma plataforma robótica montada em uma antepara; em alguns casos, transitarei sobre trilhos; em alguns casos, serei solicitado a percorrer o espaço com um design rastreado ou ambulante. Portanto, quando olhamos para a plataforma robótica, hoje estamos realmente focados na modularidade e nesses subcomponentes.’
Além da mecânica, o ambiente operacional é levado em consideração. ‘Como faço o serviço quando estou em uma calha de quase dois metros de altura em uma embarcação que se move a 20 nós?’, pergunta Taylor. ‘Um ser humano é muito bom em descobrir sua própria estabilização, três pontos de contato, uma mão segurando uma ferramenta. Um robô deve ser capaz de fazer a mesma coisa.’ Ao reduzi-lo à sua essência, Taylor disse que ele seria imaginado como Legos.
Rumo à autonomia da robótica marítima
‘Existem componentes essenciais que todo robô precisará: alguma autonomia básica, alguma IA básica, a maneira como você o treina. para se mover, a maneira como você o controla remotamente, sistemas de visão, etc., que são itens comuns da plataforma. Mas então, quando penso em todos os equipamentos que vou trocar ou interagir, posso precisar de 15, 20 ferramentas diferentes de tamanhos diferentes. Vou precisar de diferentes capacidades de elevação; e tudo isso exige que nossa plataforma seja capaz de se adaptar a ele; trocar peças automaticamente para ir para um local de trabalho específico ou configurações diferentes naquele robô. Mas quero uma metodologia de controlo comum; Quero uma metodologia de cobrança comum; Quero uma metodologia de autonomia comum.’
Em última análise, tudo se resume ao princípio orientador que cerca qualquer tecnologia complexa: mantê-la simples, o que é muito mais fácil de falar do que fazer.
O papel da robótica na sala de máquinas
‘Você precisaremos de recursos diferentes em momentos diferentes’, disse Taylor. ‘Por exemplo, se estou fazendo algo em um motor, talvez precise ser capaz de levantar e suportar 150-200 libras; mas também posso precisar de uma manipulação muito precisa de pequenos acessórios para remover essa peça. Então provavelmente não terei um robô bípede de dois braços. Terei um robô que pode se apoiar em um trilho ou em uma antepara para esse levantamento pesado, e pode ter quatro braços, dois braços de movimento bruto que podem lidar com o levantamento pesado e, em seguida, dois braços habilidosos que estão fazendo o trabalho perfeito. movimentos de fixação.
Em última instância, se for bem sucedido com ampla adoção, o uso da robótica na sala de máquinas poderá mudar o design real do próprio motor. No início, a robótica deve ser projetada para conduzir seus negócios como se fosse um ser humano, portanto, no mínimo, a FMD está projetando [a robótica] para ser equivalente a um ser humano em força e amplitude de movimento.
Desafios no desenvolvimento e implementação de robótica marítima
Mas como a autonomia ganha força, haverá uma lacuna. ‘Será uma pequena lacuna entre o momento em que essas embarcações sem tripulação começarem a ser lançadas e antes que haja um número suficiente delas na frota para que os fornecedores de equipamentos de capital redesenhem seus sistemas para suporte robótico’, disse Taylor. ‘Portanto, temos que preencher uma lacuna onde temos desempenho humano equivalente em muitos casos, para manipulação de ferramentas, para alcance, para graus de liberdade de movimento, a cinemática de realmente mover peças para dentro e para fora de uma peça de equipamento, por exemplo : estamos levando isso em consideração em nossos projetos hoje.’
‘Hoje, estamos no que chamamos de geração 0.2, onde temos um protótipo que se move. Temos recursos de controle com detecção limitada a bordo, mas há muitas pesquisas baseadas em dados que precisamos fazer para influenciar a próxima geração. Neste momento estamos passando por uma avaliação científica dos procedimentos básicos e principais de manutenção de um motor, onde estamos fazendo o mapeamento: Qual a quantidade de conexões? Quais são os tamanhos? Qual o volume que tenho para realizar os serviços como humano? Quanto torque eu preciso em qualquer conexão individual nesses procedimentos de manutenção? Estamos fazendo essa documentação agora mesmo, enquanto falamos, em nossos motores, o que provavelmente nos levará ao longo de todo o ano [2023]’, com o plano de ter uma plataforma básica até 2025.
Conforme publicado no Edição de dezembro de 2023 do Maritime Reporter & Engineering News. Assista à entrevista completa com Trey Taylor na Maritime Reporter TV:
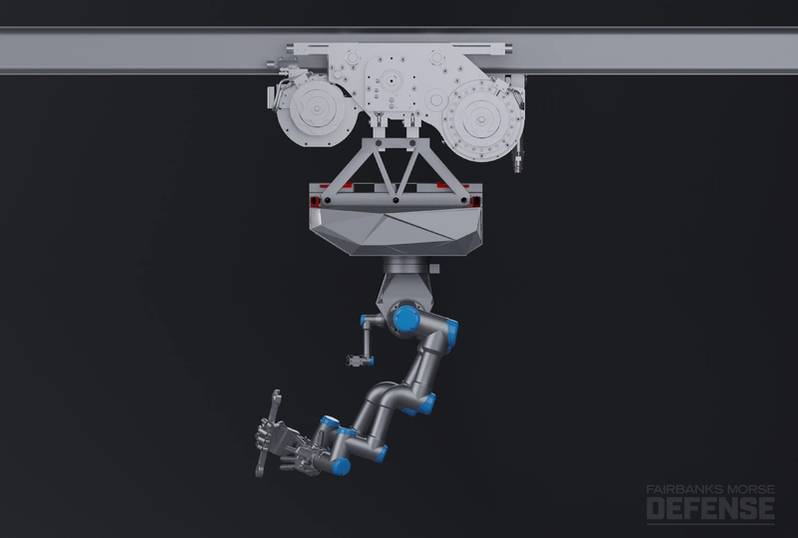 Imagem cortesia FMD
Imagem cortesia FMD
Tecnologia Robótica Marítimo









Seja o primeiro a reagir!