

 Chinês (Simplificado)
Chinês (Simplificado)  Chinês (Tradicional)
Chinês (Tradicional)  Inglês
Inglês  Francês
Francês  Alemão
Alemão  Italiano
Italiano  Japonês
Japonês  Norueguês
Norueguês  Espanhol
Espanhol 
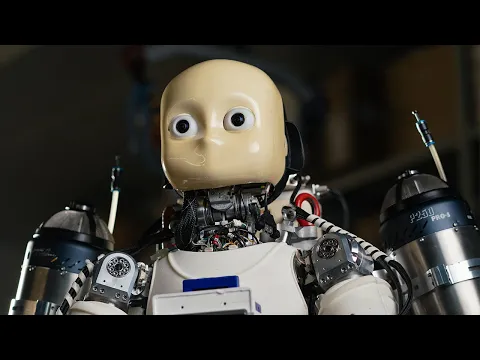
Robô com rosto de bebê e mochila a jato realiza voo vertical bem-sucedido e entra para a história da robótica internacional com tecnologia inédita
Um robô com rosto de bebê e mochila a jato entrou para a história. Batizado de iRonCub MK3, ele se tornou o primeiro humanoide a voar verticalmente com sucesso.
O feito foi realizado por pesquisadores do Instituto Italiano di Tecnologia (IIT) e registrado em vídeo, publicado no canal oficial do instituto no YouTube no último dia 18.
Desenvolvido a partir da plataforma iCub, o robô tem cerca de 1 metro de altura e pesa 22 quilos. Sua aparência lembra a de um bebê, com rosto liso e brilhante.
-
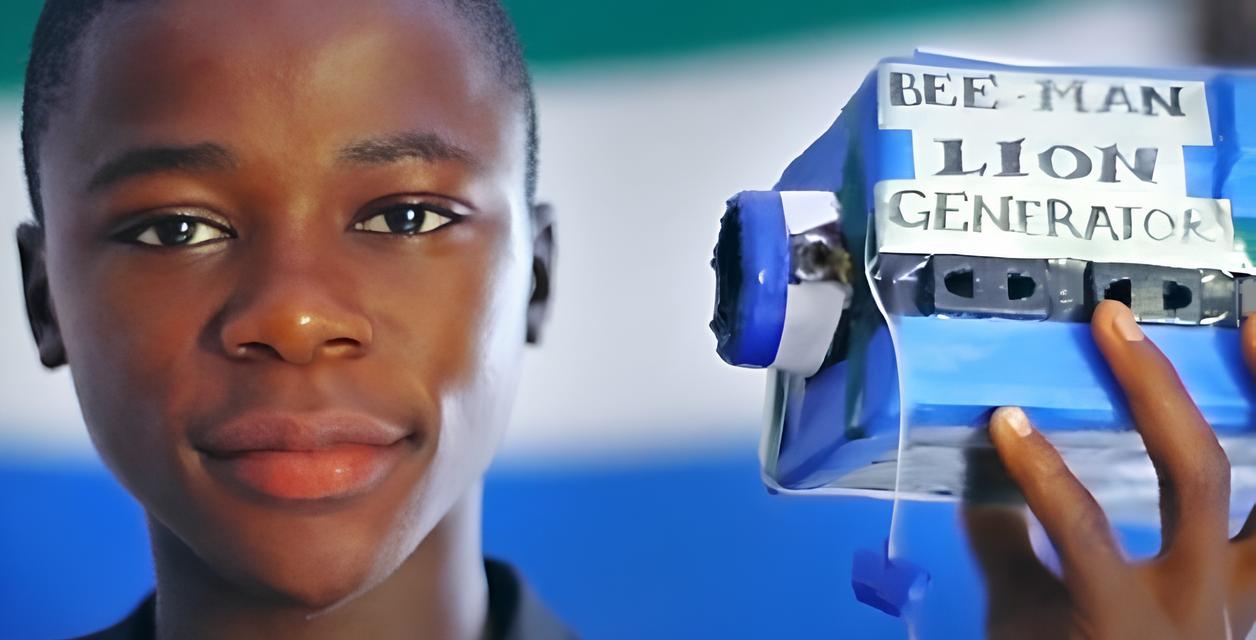
Com apenas 13 anos e usando sucata eletrônica, este jovem africano construiu geradores, criou sua própria estação de rádio e levou eletricidade para uma comunidade inteira esquecida pelo governo

-
O novo Xiaomi 15T Pro é o topo de linha mais completo da marca: 1 TB, IP68, 90W e câmeras de 50 MP Leica

-
Cientista que trocou a Europa pelo Brasil criou método que fez o país economizar bilhões e dominar o mercado da soja

-
Cientistas do Brasil e da Síria desenterram pterossauro colossal de 10 m: fóssil esquecido por 20 anos surpreende e atinge 90% do tamanho do maior animal voador já registrado





O projeto original surgiu em 2009, dentro de um consórcio europeu voltado para o estudo da cognição humana e da inteligência artificial.
Para permitir o voo, os engenheiros realizaram várias modificações na estrutura. Foram instalados quatro propulsores — dois no lugar dos braços e dois em uma mochila nas costas.
Além disso, foi criada uma nova espinha de titânio, capaz de suportar o conjunto do jetpack e os suportes necessários para o equilíbrio.
As versões anteriores do robô enfrentaram problemas de superaquecimento. Por isso, o novo modelo recebeu painéis e coberturas resistentes ao calor, suportando temperaturas acima de 600 °C.
A versão MK3 ainda não possui antebraços nem mãos. Esses elementos foram retirados para dar espaço aos propulsores. No entanto, segundo os pesquisadores, esses componentes são compatíveis e devem voltar em versões futuras do projeto.
O controle do voo é feito por um sistema chamado Model Predictive Control (MPC), que calcula a posição ideal das articulações e o impulso necessário em tempo real.
Os primeiros testes foram feitos em simulações e analisados com o Método dos Elementos Finitos (FEM), uma técnica de engenharia usada para prever comportamentos físicos complexos.
Depois de muitos ajustes e validações, o iRonCub MK3 conseguiu decolar com estabilidade. Agora, o foco da equipe está em preparar o robô para voos em ambientes com vento e clima desfavorável, ampliando os testes em condições reais.
Com informações de Canal Tech.







Seja o primeiro a reagir!