
 Inglês
Inglês  Espanhol
Espanhol 
Robô japonês de apenas 8 centímetros mostrou que a exploração lunar também pode avançar com máquinas pequenas, autônomas e inspiradas em tecnologia de brinquedos
Um robô japonês do tamanho da palma da mão ganhou destaque na exploração espacial ao se transformar sobre a superfície da Lua e registrar uma imagem histórica da missão SLIM, da Agência Japonesa de Exploração Aeroespacial, a JAXA. Chamado SORA-Q, o equipamento foi enviado como parte do módulo lunar Smart Lander for Investigating Moon e operou de forma autônoma em um ambiente extremo.
A história voltou ao debate após a publicação de um estudo na revista Science Robotics, em 2026, detalhando como o pequeno rover conseguiu se mover no solo lunar, selecionar imagens e transmitir dados sem depender de controle direto a partir da Terra. O feito chama atenção porque mostra um caminho diferente para futuras missões: em vez de depender apenas de grandes veículos, a exploração pode usar robôs compactos, leves e distribuídos.
O SORA-Q, também identificado como LEV-2, foi desenvolvido em parceria entre JAXA, TOMY Company, Sony Group Corporation e Universidade Doshisha. A proposta uniu engenharia espacial, sensores, processamento de imagem e experiência da indústria de brinquedos em mecanismos de transformação compactos.
-
A cidade de pedra que alimentava 30 mil pessoas no meio do deserto, escondia 800 monumentos esculpidos na rocha e ainda faz a ciência moderna tentar entender como os nabateus dominaram a água há 2 mil anos

-
Ele desapareceu junto com os dinossauros… até reaparecer vivo e deixar a ciência completamente intrigada

-
Índia afunda tubos gigantes de tecido cheios de areia a 6 metros de profundidade para criar uma barreira invisível no mar, reduzir a força das ondas e tentar reconstruir praias que estão desaparecendo com a erosão

-
A China lançou o robô humanoide mais parecido com um ser humano já vendido ao público, com pele de silicone, 88 articulações e preço que parte de 119.800 yuans, cerca de US$ 17.600





Apesar do visual curioso, o robô não era um brinquedo levado à Lua. Era um demonstrador tecnológico preparado para testar mobilidade autônoma, comunicação entre robôs e operação em terreno lunar, pontos considerados importantes para futuras missões científicas e de exploração planetária.
SORA-Q levou tecnologia de brinquedos para uma missão real na Lua

De acordo com a JAXA, o desenvolvimento do robô começou a partir de uma iniciativa de pesquisa com a TOMY Company em 2016, com o objetivo de criar um robô pequeno, barato e capaz de operar tanto no espaço quanto na Terra usando tecnologias inspiradas em brinquedos. A Sony entrou no projeto em 2019, enquanto a Universidade Doshisha passou a participar em 2021.
O resultado foi um rover ultracompacto com cerca de 8 centímetros de diâmetro antes da transformação e peso aproximado de 250 gramas, segundo informações divulgadas pela Sony. Para uma missão lunar, essas dimensões são relevantes porque cada grama lançada ao espaço impacta custo, consumo de energia e complexidade de integração com a espaçonave.
A TOMY informou que o SORA-Q foi criado para sair do módulo em formato esférico e, ao chegar à superfície, abrir sua estrutura até se tornar um pequeno veículo capaz de se deslocar. A tecnologia aproveitou conhecimento acumulado pela empresa em mecanismos compactos, mas adaptado a um ambiente muito mais severo que qualquer produto de consumo.
Robô foi lançado com a missão SLIM antes de transformar a superfície lunar em laboratório
A missão SLIM foi lançada do Centro Espacial de Tanegashima, no Japão, em 7 de setembro de 2023, a bordo do foguete H-IIA. Segundo a JAXA, o objetivo principal era demonstrar uma tecnologia de pouso de alta precisão, chamada de “pinpoint landing”, essencial para futuras missões que precisem pousar perto de crateras, encostas, regiões com gelo ou pontos específicos de interesse científico.
O pouso ocorreu em 20 de janeiro de 2024, no horário do Japão, fazendo do país o quinto a conseguir um pouso suave na Lua. A JAXA informou que o módulo se comunicou com a Terra após tocar o solo, mas ficou em uma posição diferente da planejada, o que impediu a geração imediata de energia pelos painéis solares.
Mesmo com esse problema, a agência japonesa confirmou que a SLIM chegou a cerca de 55 metros a leste do alvo original. A precisão antes da manobra final de desvio de obstáculos foi avaliada em aproximadamente 10 metros ou menos, o que permitiu à JAXA afirmar que a demonstração de pouso dentro de uma margem de 100 metros foi alcançada.
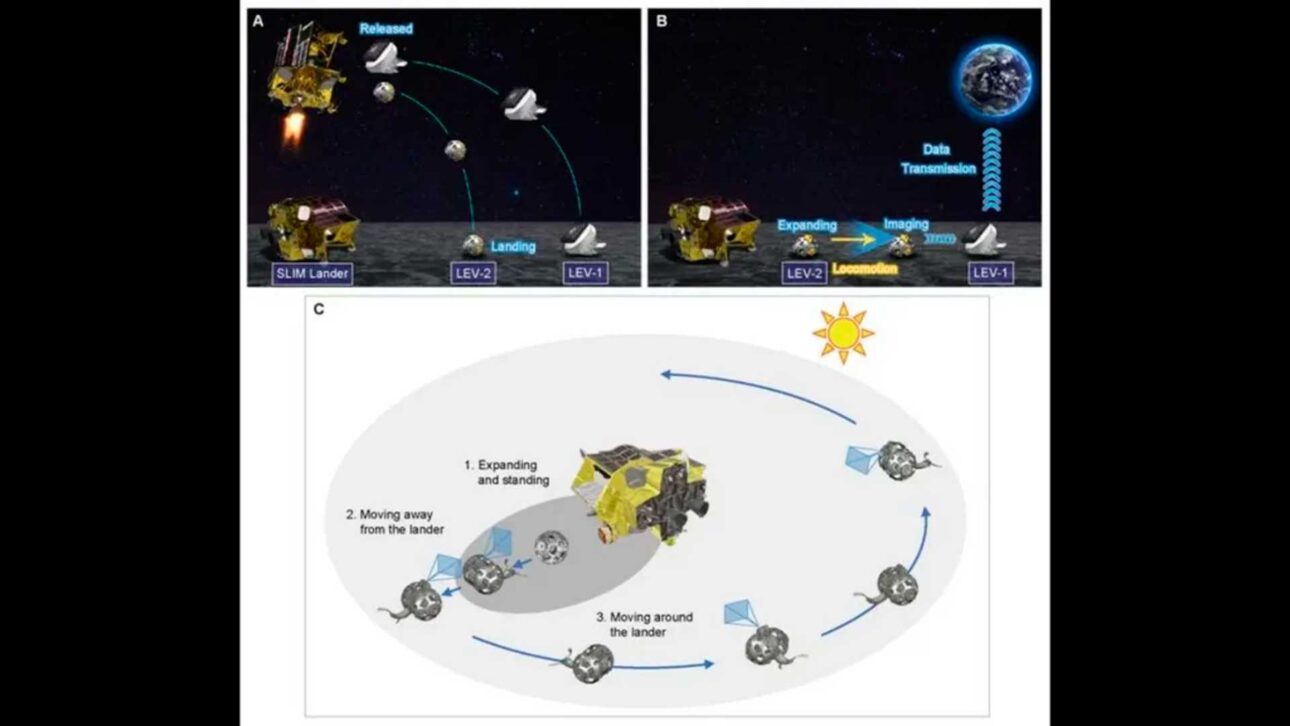
Foi nesse contexto delicado que os pequenos veículos LEV-1 e LEV-2 foram separados pouco antes do pouso. O SORA-Q, ou LEV-2, teve a missão de registrar imagens do módulo e do entorno, enquanto o LEV-1 funcionou como parte do sistema de retransmissão de dados.
Como a esfera se transformou em rover no solo lunar
O SORA-Q viajou até a Lua em formato esférico, uma solução que facilitou o transporte e reduziu o volume ocupado dentro da missão. Depois de liberado, o robô abriu sua estrutura e passou para uma configuração com rodas, usando as duas metades da esfera como elementos de locomoção.
A Sony explicou que o sistema também contava com uma câmera e recursos de processamento embarcado para permitir que o rover reconhecesse o módulo SLIM e escolhesse imagens úteis para transmissão. O equipamento não foi pensado para longas distâncias, mas para uma tarefa objetiva: mover-se perto do pousador, fotografar e enviar informações críticas.
A comunicação também foi projetada para economizar energia e simplificar o robô. Em vez de transmitir diretamente para a Terra, o SORA-Q enviou dados ao LEV-1, que depois repassou as informações aos controladores da missão.
Segundo a divulgação conjunta da JAXA, Sony, TOMY e Doshisha, a imagem capturada pelo SORA-Q comprovou várias etapas ao mesmo tempo: a transformação do robô, seu deslocamento no solo lunar, a captura de imagens, a seleção autônoma dos dados e a comunicação sem fio com o LEV-1.
Foto do pouso ajudou a explicar por que a SLIM ficou em posição inesperada
A imagem feita pelo SORA-Q se tornou uma das mais importantes da missão porque mostrou a SLIM sobre a superfície lunar em uma posição anormal. Segundo a JAXA, dados técnicos indicaram que um dos dois motores principais provavelmente perdeu empuxo a cerca de 50 metros de altitude, antes do início da manobra de desvio de obstáculos.
Mesmo assim, o software de bordo da SLIM identificou a anomalia e continuou a descida com o outro motor, tentando controlar a posição horizontal o máximo possível. A agência informou que a velocidade de contato com o solo ficou dentro da faixa de projeto, mas a atitude e a velocidade lateral contribuíram para que o módulo terminasse em uma posição diferente da planejada.
Nesse ponto, o SORA-Q cumpriu um papel que vai além da curiosidade tecnológica. Ao fotografar o módulo na Lua, o pequeno rover forneceu evidência visual para avaliar o resultado do pouso, ajudando os engenheiros a entenderem melhor o comportamento da espaçonave após o toque no solo.
Estudo de 2026 mostra por que pequenos robôs podem ser úteis em futuras missões
O estudo publicado na Science Robotics, apresentado em junho de 2026, detalhou como o LEV-2 SORA-Q conseguiu realizar exploração lunar autônoma em escala extremamente reduzida. A pesquisa descreve o robô como uma plataforma capaz de navegar ao redor do pousador, capturar imagens do módulo e do ambiente e transmitir os dados selecionados por comunicação sem fio.
Segundo a cobertura científica do Phys.org sobre o artigo, o SORA-Q operou por cerca de 108 minutos antes da perda de comunicação. O tempo foi curto, mas suficiente para demonstrar que microrrobôs podem executar tarefas úteis em missões nas quais tamanho, peso, energia e custo são limitados.
A missão também revelou desafios importantes. Robôs muito pequenos têm menos bateria, menor capacidade de processamento e enfrentam dificuldades para se mover em terrenos cobertos por regolito, o solo fino e poeirento da Lua. Por isso, a solução transformável foi relevante: o robô combinou formato compacto no transporte com uma configuração mais adequada para locomoção após o pouso.
Outro ponto destacado pelos pesquisadores foi a necessidade de melhorar telemetria, comunicação entre veículos e flexibilidade de software em futuras versões. Em missões mais longas, robôs desse tipo precisarão lidar com imprevistos sem depender de instruções constantes da Terra.
Japão usa a SLIM para mostrar nova fase da exploração lunar
A missão SLIM não foi importante apenas pelo SORA-Q. Conforme a JAXA, a proposta era mudar a lógica de “pousar onde é possível” para “pousar onde se deseja”, um avanço essencial para missões que precisam chegar com precisão a pontos de interesse científico.
Após o pouso, a SLIM chegou a ser desligada por causa da posição desfavorável dos painéis solares, mas voltou a operar quando a iluminação mudou. Em agosto de 2024, a JAXA encerrou oficialmente as atividades do módulo, depois de perder contato com a espaçonave. Mesmo assim, a agência informou que a missão superou expectativas ao sobreviver a três noites lunares, algo que não fazia parte do plano original.
Esse desempenho reforçou a relevância do projeto japonês. A SLIM testou pouso preciso, observações com câmera multibanda e operação de pequenos robôs, enquanto o SORA-Q mostrou que tecnologias vindas de setores aparentemente distantes, como a indústria de brinquedos, podem encontrar aplicações reais na exploração espacial.
O que o pequeno rover japonês pode representar para a exploração da Lua e de Marte
A experiência do SORA-Q indica que futuras missões lunares podem usar enxames ou conjuntos de robôs pequenos para explorar áreas próximas a módulos de pouso, crateras, cavernas, encostas e regiões onde veículos maiores teriam dificuldade. Esses robôs não substituem grandes rovers científicos, mas podem funcionar como exploradores auxiliares, ampliando a visão da missão e reduzindo riscos.
Também há uma vantagem econômica. Por serem menores e mais leves, plataformas como o SORA-Q podem ser integradas a missões maiores sem exigir grande volume de carga. Isso abre espaço para que diferentes sensores, câmeras e sistemas de comunicação sejam testados em ambientes reais.
O robô japonês chamou atenção justamente por unir simplicidade visual e alta complexidade técnica. Ele parecia um pequeno “transformer” lunar, mas seu valor científico estava na autonomia, no baixo peso, no mecanismo de locomoção e na capacidade de gerar dados úteis em uma missão histórica.
O caso mostra que a próxima etapa da exploração espacial pode não depender apenas de máquinas gigantes e caríssimas. Em alguns cenários, robôs pequenos, inteligentes e cooperativos podem ser a diferença entre apenas pousar em outro mundo e realmente entender o que aconteceu ao chegar lá.




