
 Chinês (Simplificado)
Chinês (Simplificado)  Chinês (Tradicional)
Chinês (Tradicional)  Inglês
Inglês  Francês
Francês  Alemão
Alemão  Italiano
Italiano  Japonês
Japonês  Norueguês
Norueguês  Espanhol
Espanhol 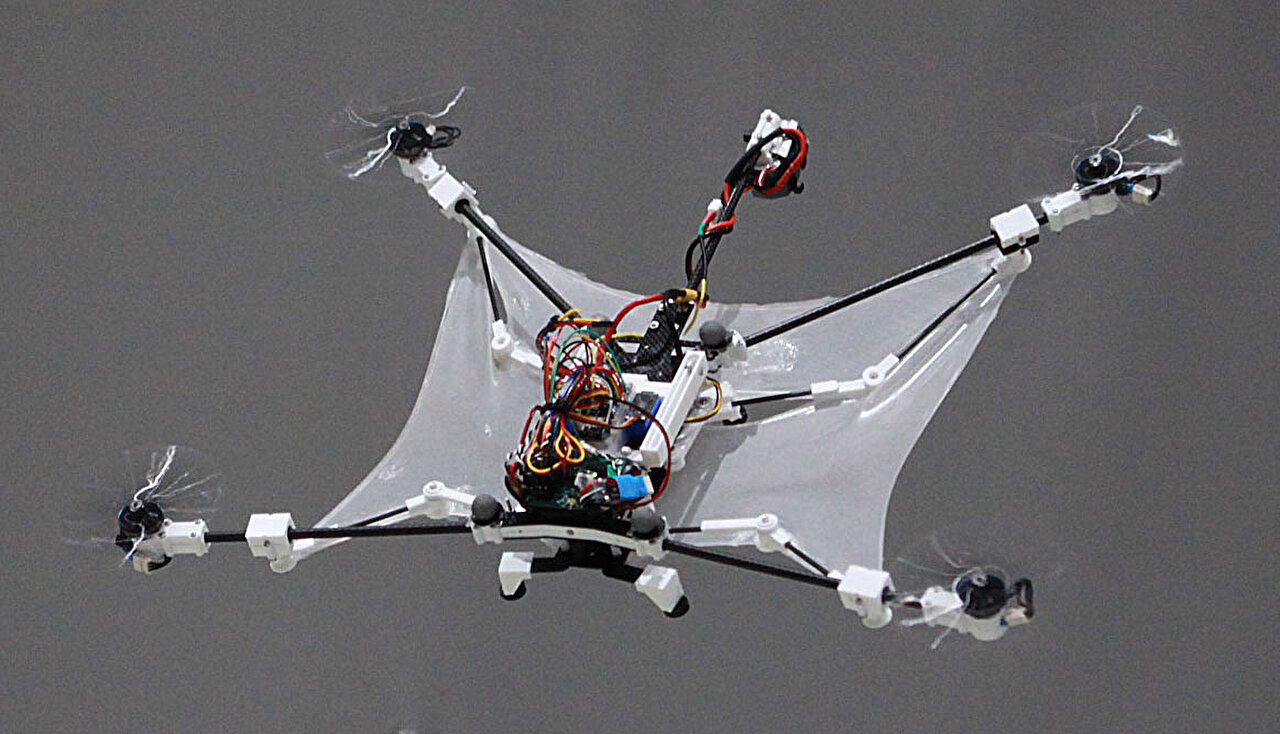
Inspirado nos esquilos-voadores, novo drone sul-coreano utiliza asas retráteis e inteligência artificial para realizar manobras rápidas com mais precisão e segurança.
Os drones, também chamados de veículos aéreos não tripulados, se tornaram ferramentas essenciais em diversas áreas. Estão presentes em produções de filmes, agricultura, segurança, construção, logística e até defesa.
Com essa versatilidade, pesquisadores seguem buscando formas de torná-los ainda mais eficientes.
Uma equipe da Coreia do Sul acaba de apresentar uma novidade nesse campo: um drone com asas dobráveis inspirado no esquilo-voador.
-
Mineração de terras raras usará reservatórios de cidade mineira que já enfrenta escassez de água e tem risco de seca até 2030

-
NASA encontra rocha em Marte que pode ser o sinal mais forte de vida já detectado no planeta

-
Cimento vivo pode virar bateria gigante: prédios inteiros vão armazenar energia nas paredes

-
Tsunami invisível de 200 metros sacudiu a Terra por 9 dias e revela como o aquecimento global ameaça nosso futuro





Inspiração vinda da natureza
A pesquisa é liderada por engenheiros da Universidade de Ciência e Tecnologia de Pohang e do Centro de Tecnologia de Autonomia de IA da Agência para o Desenvolvimento da Defesa (ADD).
O modelo que desenvolveram tem asas retráteis que se abrem e fecham conforme a necessidade de voo, imitando a habilidade dos esquilos-voadores de planar de árvore em árvore.
Segundo os pesquisadores Dohyeon Lee, Jun-Gill Kang e Soohee Han, o objetivo foi permitir que o drone desacelere de forma eficiente, assim como os esquilos fazem ao abrir as asas momentos antes de pousar.
A ideia surgiu da observação da forma como esses animais usam o arrasto aerodinâmico do corpo para controlar o pouso.
Desempenho superior em manobras
O novo artigo da equipe, publicado no servidor de pré-impressão arXiv, dá sequência a um trabalho anterior que já apresentava o robô inspirado em esquilos.
Na versão mais recente, os engenheiros incluíram membranas de asas implantáveis. Essa modificação proporcionou melhor desempenho em manobras exigentes, como curvas fechadas e paradas rápidas.
Em voos convencionais em linha reta, o arrasto aerodinâmico das asas pode ser prejudicial ao desempenho. No entanto, quando o drone precisa reagir rapidamente para evitar obstáculos, esse mesmo arrasto se transforma em vantagem.
A força gerada pela abertura das asas ajuda o drone a desacelerar ou mudar de direção de forma eficiente.
Controle inteligente com redes neurais
Para melhorar a precisão dos movimentos, os pesquisadores treinaram redes neurais artificiais. Elas foram ensinadas a prever o arrasto causado pelas asas de silicone.
Com base nesses dados, os cientistas desenvolveram uma estratégia de Controle de Coordenação de Empuxo-Asa (TWCC), que ajusta tanto as asas quanto os motores em tempo real.
O sistema TWCC permite ao drone decidir quando abrir ou fechar as asas, de acordo com o ambiente. Isso garante mais segurança durante voos em locais com obstáculos, além de melhorar o desempenho em situações inesperadas.
Outro ponto importante foi manter o formato tradicional de um quadricóptero, mesmo com as asas dobráveis.
Hardware leve e eficiente
Uma das vantagens mais marcantes do projeto é o uso de um chip MCU integrado.
Ele dispensa a necessidade de sistemas externos de computação. Isso só é possível porque o algoritmo que comanda o drone é leve e consome pouca energia.
Mesmo microcontroladores simples, como os da classe Arduino, são suficientes para rodar o sistema.
Com esse tipo de tecnologia, o drone se torna mais acessível e portátil.
Pode operar com autonomia em locais remotos, sem depender de equipamentos extras. Essa característica amplia suas possibilidades de uso em diferentes setores.
Possibilidades futuras de aplicação
O drone esquilo-voador ainda está em desenvolvimento, mas os testes indicam grande potencial.
Segundo os pesquisadores, ele poderá ser utilizado para monitoramento ambiental, filmagens aéreas, missões de busca e salvamento e até atividades de defesa.
A equipe também estuda novas melhorias.
Entre elas, a criação de um trem de pouso especial que permita ao drone aterrissar em superfícies verticais, como árvores e paredes. Essa manobra simularia com ainda mais fidelidade o comportamento de pouso dos esquilos-voadores na natureza.
Outro foco está no planejamento de movimento do drone em tempo real.
Como as características aerodinâmicas mudam durante o voo, os pesquisadores pretendem aprimorar os controles para que o aparelho responda de forma ainda mais eficiente a diferentes situações.







Seja o primeiro a reagir!