
 Chinês (Simplificado)
Chinês (Simplificado)  Chinês (Tradicional)
Chinês (Tradicional)  Inglês
Inglês  Francês
Francês  Alemão
Alemão  Italiano
Italiano  Japonês
Japonês  Norueguês
Norueguês  Espanhol
Espanhol 





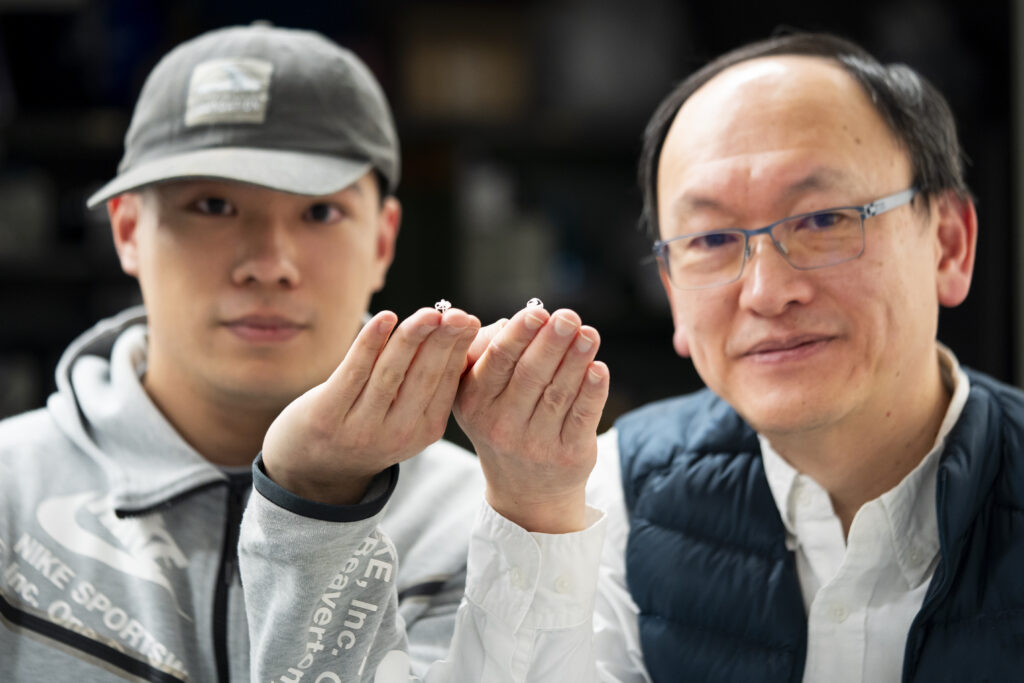
Novo robô voador, o menor do mundo, imita abelhas e usa ímãs para missões de busca e resgate. Projeto pode revolucionar operações em áreas de risco
Um grupo de pesquisadores da Universidade da Califórnia, em Berkeley, desenvolveu o menor robô voador sem fio já criado. Inspirado em abelhas, o dispositivo mede menos de um centímetro de diâmetro e pesa apenas 21 miligramas. Apesar do tamanho minúsculo, ele consegue voar, pairar no ar e atingir alvos com precisão.
O mecanismo de voo do robô é baseado em um sistema simples e engenhoso. Com dois pequenos ímãs incorporados a uma estrutura parecida com uma hélice, ele gira ao ser exposto a um campo magnético externo. Essa rotação gera sustentação suficiente para o robô conseguir decolar e se mover no ar.
O controle é feito sem fios. Um campo magnético externo é ajustado para mudar a direção e a trajetória do voo. Essa técnica permite que o menor robô do mundo se aproxime de alvos designados com controle preciso. O movimento lembra o voo de uma abelha ao coletar néctar.
-
Senhas com os dias contados: nova tecnologia usada pelo Google promete enterrar login tradicional

-
França inaugura a primeira rodovia do mundo que recarrega carros elétricos em movimento — bobinas ocultas sob o asfalto geram até 300 kW e prometem revolucionar o transporte pesado

-
Uma colaboração de 13 anos e 18 países que mapeou os 3,2 bilhões de pares de bases do DNA humano, lançando a era da medicina personalizada

-
NASA investiga anomalia gravitacional misteriosa na África: o que está acontecendo a 3.000km sob nossos pés?






Liwei Lin, professor de Engenharia Mecânica da UC Berkeley, explicou que o projeto foi inspirado diretamente nas abelhas. Ele afirmou que o robô voador pode ser controlado remotamente para imitar a forma como esses insetos se movem entre flores. A referência às abelhas se estende também à leveza e agilidade do voo.
Novo robô voador: superando limitações técnicas com inovação
Os pesquisadores enfrentaram um desafio comum no desenvolvimento de microrrobôs voadores: o tamanho reduzido dificulta a inclusão de componentes como baterias e eletrônicos de controle.
A solução encontrada foi alimentar e controlar o dispositivo usando campos magnéticos. Dessa forma, não é necessário incluir uma fonte de energia interna.
Com essa abordagem, o robô superou limitações técnicas de outros modelos de tamanho semelhante. Conforme a equipe, o robô mais próximo com capacidade de voo comparável mede cerca de 2,8 centímetros, quase três vezes maior que o novo modelo.
Fanping Sui, coautor do estudo, destacou possíveis aplicações práticas. Segundo ele, robôs voadores tão pequenos podem ser úteis em áreas de difícil acesso. Um exemplo seria a inspeção de locais estreitos, como o interior de canos. Também há potencial para polinização artificial em ambientes controlados.
Limitações
Apesar dos avanços, o robô ainda tem limitações. Atualmente, ele não possui sensores para detectar sua posição ou ajustar a rota em tempo real. Isso o torna sensível a mudanças externas, como rajadas de vento. O voo é passivo e depende da estabilidade do ambiente.
Wei Yue, aluno de pós-graduação que participou do projeto, afirmou que os pesquisadores trabalham para adicionar controle ativo ao robô. A ideia é que, no futuro, ele consiga reagir ao ambiente durante o voo, ajustando sua posição e trajetória de forma autônoma.
Outra limitação é a necessidade de um campo magnético forte, gerado por uma bobina eletromagnética. Segundo os pesquisadores, diminuir ainda mais o tamanho do robô, para menos de 1 milímetro, poderia permitir o uso de campos mais fracos. Isso abriria caminho para novas fontes de energia, como ondas de rádio.
Robôs em miniatura ganham espaço
O robô faz parte de um conjunto de estudos sobre microrrobótica na UC Berkeley. Além do robô inspirado em abelhas, os pesquisadores também desenvolveram um modelo baseado em baratas. Esse robô terrestre pode correr sobre superfícies e suportar o peso de um passo humano.
Outro destaque são os chamados robôs de enxame. Com cerca de 5 milímetros de tamanho, essas unidades podem rastejar, rolar, girar e se conectar umas às outras.
A colaboração entre elas permite realizar tarefas mais complexas, como formar estruturas ou atuar em conjunto em procedimentos médicos.
Esses robôs de enxame estão sendo projetados com foco em cirurgias minimamente invasivas. Eles poderiam, por exemplo, ser injetados no corpo e formar stents, remover coágulos ou atuar em áreas específicas com precisão.
O desenvolvimento desses robôs mostra o avanço da engenharia em miniatura. A equipe da UC Berkeley continua buscando novas formas de aplicar essas tecnologias em ambientes reais.
Com informações de Interesting Engineering.









Difícil de ler. Os anúncios impossibilitam a leitura da matéria. Difícil até de escrever o comentário. Meu Deus, que horror !!! Desrespeito total ao leitor
“diminuir ainda mais para menos de um CENTÍMETRO”
Eu renho orohetos de inovação e estou a procura de investimentos de ONG.s q trabalham nesse tipo de ajuda.