

 Chinês (Simplificado)
Chinês (Simplificado)  Chinês (Tradicional)
Chinês (Tradicional)  Inglês
Inglês  Francês
Francês  Alemão
Alemão  Italiano
Italiano  Japonês
Japonês  Norueguês
Norueguês  Espanhol
Espanhol 
A exploração espacial pode dar um salto com robôs controlados remotamente, projetados para operar na Lua e Marte. Descubra como os primeiros testes indicam que essa tecnologia pode ser o futuro da exploração de novos mundos!
A exploração espacial está prestes a dar um novo passo com o uso de robôs controlados remotamente para operar em ambientes hostis como a Lua e Marte.
Os avanços em teleoperação de veículos robóticos têm mostrado um grande potencial, permitindo que humanos na Terra manuseiem ferramentas e equipamentos no espaço com precisão. Esses robôs de exploração espacial podem realizar tarefas complexas como coleta de amostras, escavação e montagem de estruturas em planetas ou luas distantes.
Primeiros testes promissores
Recentemente, o laboratório de robótica da Universidade de Bristol, na Inglaterra, testou um sistema inovador de teleoperações no Centro Europeu de Aplicações Espaciais e Telecomunicações da Agência Espacial Europeia (ESA).
-
NASA investiga anomalia gravitacional misteriosa na África: o que está acontecendo a 3.000km sob nossos pés?

-
Estudo revela o segredo do café feito com fezes de civeta — que pode custar até R$ 400 por xícara

-
Fim dos buracos nas estradas? Asfalto com grafeno pode eliminar buracos e reduzir custos de manutenção no Reino Unido
-
Com apenas 13 anos e usando sucata eletrônica, este jovem africano construiu geradores, criou sua própria estação de rádio e levou eletricidade para uma comunidade inteira esquecida pelo governo




A equipe conseguiu operar remotamente um braço robótico para escavar uma amostra de regolito lunar simulado, usando uma simulação virtual. Essa tecnologia elimina a necessidade de imagens ao vivo, que podem sofrer atrasos devido à distância entre a Terra e a Lua.
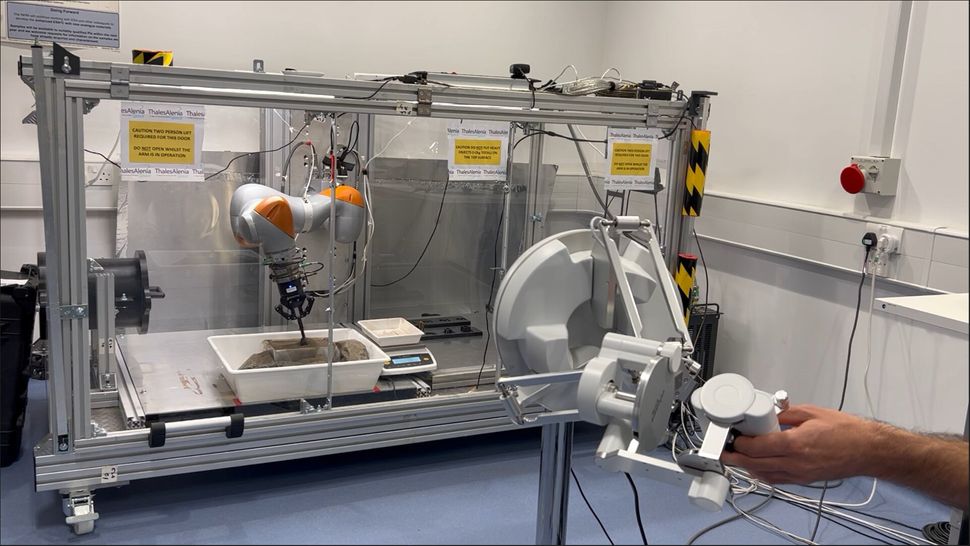
O atraso no sinal entre os dois corpos celestes é de cerca de 1,3 segundo, o que pode ser suficiente para dificultar a precisão em operações delicadas.
No entanto, com o sistema de teleoperação, os sinais podem ser retransmitidos por satélites, como os planejados no projeto Moonlight da ESA, que visa melhorar a comunicação lunar.
Exploração espacial: Sentindo o ambiente lunar
Um dos maiores diferenciais dessa tecnologia está nas interações hápticas, que fornecem uma sensação de toque ao operador. Isso significa que os teleoperadores na Terra podem sentir a resistência do solo lunar, como se estivessem realmente escavando em um ambiente com um sexto da gravidade terrestre.
A equipe de Bristol testou essa funcionalidade em tarefas simples, como pressionar o solo ou arrastar uma pá, mas ainda planeja avançar para missões mais complexas.
Segundo Joe Louca, um dos responsáveis pelo projeto, a possibilidade de ajustar a intensidade da gravidade na simulação permite preparar astronautas para o ambiente real da Lua. Ele destaca que o feedback tátil oferece uma sensação realista de como a poeira lunar se comportaria.
Superando os desafios de confiança
Antes de colocar essa tecnologia em prática, ainda existem desafios psicológicos a serem superados. Um dos maiores problemas é a confiança dos operadores de que o sistema virtual está realmente refletindo a realidade física no espaço. Estudos já demonstraram que essa falta de confiança pode ser uma barreira para o uso pleno da teleoperação.
Entretanto, a equipe de Louca obteve resultados positivos em testes. Durante a coleta de regolito simulado, o sistema foi 100% eficiente e 92,5% confiável.
Embora despejar o regolito tenha sido uma tarefa um pouco menos precisa, eles identificaram que ajustes na orientação da concha do robô melhoraram o desempenho.

Aplicações futuras em Marte
Embora o foco inicial seja a Lua, a teleoperação de robôs também pode desempenhar um papel crucial em futuras missões a Marte.
A recuperação de amostras de solo marciano é uma tarefa extremamente desafiadora, e robôs controlados remotamente poderiam auxiliar na coleta e transporte de amostras para veículos que as trariam de volta à Terra.
O projeto de retorno de amostras de Marte da NASA, por exemplo, já enfrenta desafios de orçamento e cronograma. A Rocket Lab, empresa contratada pela NASA, está conduzindo estudos para desenvolver uma solução, e é possível que a teleoperação venha a ser integrada no futuro. No entanto, o uso dessa tecnologia para Marte ainda está em fases iniciais de exploração.
Com o avanço das missões espaciais nos próximos anos, como o programa Artemis da NASA e o Chang’e da China, o uso de robôs teleoperados pode ser uma ferramenta valiosa para apoiar tanto missões tripuladas quanto não tripuladas.
A capacidade de treinar astronautas e realizar operações complexas remotamente torna essa tecnologia uma promessa para o futuro da exploração espacial.









Seja o primeiro a reagir!