Inglês
Inglês  Espanhol
Espanhol 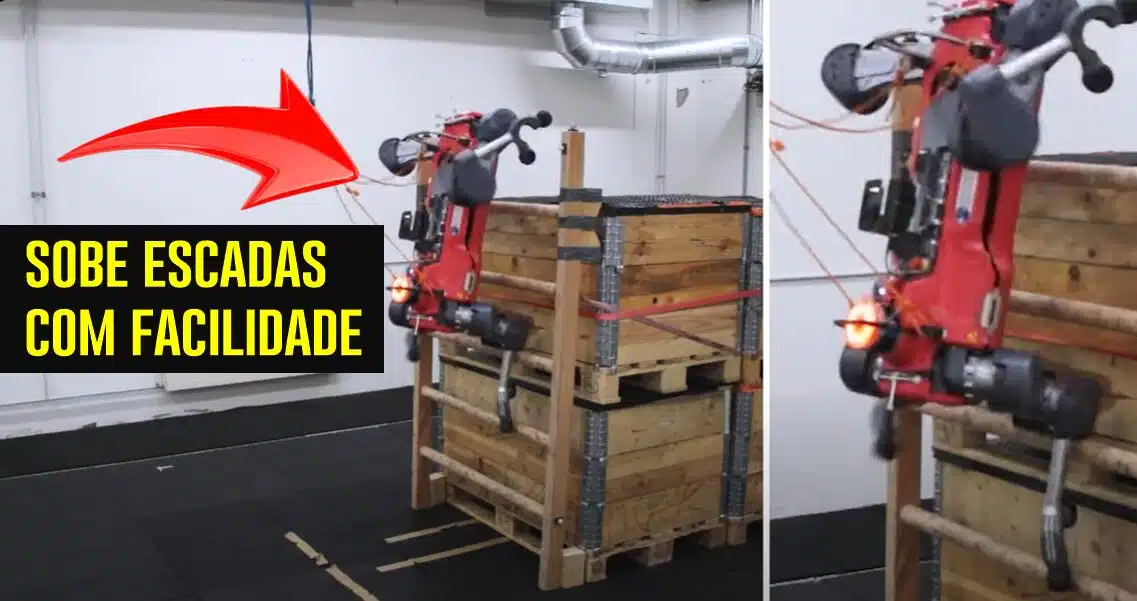
Engenheiros da Suíça criam um robô de resgate capaz de subir escadas com eficiência, permitindo que equipes de emergência atuem em locais de difícil acesso. Descubra como essa tecnologia pode transformar o futuro das operações de resgate.
Os avanços na robótica continuam a transformar a maneira como os robôs interagem com o mundo, e o mais recente marco vem da ETH Zurich, que aprimorou o robô quadrúpede ANYMal para enfrentar um desafio comum: a escalada de escadas.
O Robotics Systems Lab da universidade desenvolveu uma solução inovadora, criando patas em forma de gancho personalizadas para o ANYMal, permitindo que ele suba escadas padrão com uma eficiência impressionante. Essa inovação é um grande passo para tornar robôs quadrúpedes mais versáteis em ambientes industriais e de resgate.
A evolução do ANYMal
O robô ANYMal já era reconhecido por sua capacidade de se locomover em terrenos irregulares, mas a escalada de escadas representava uma barreira. A ETH Zurich enfrentou esse desafio modificando o design das patas do robô.
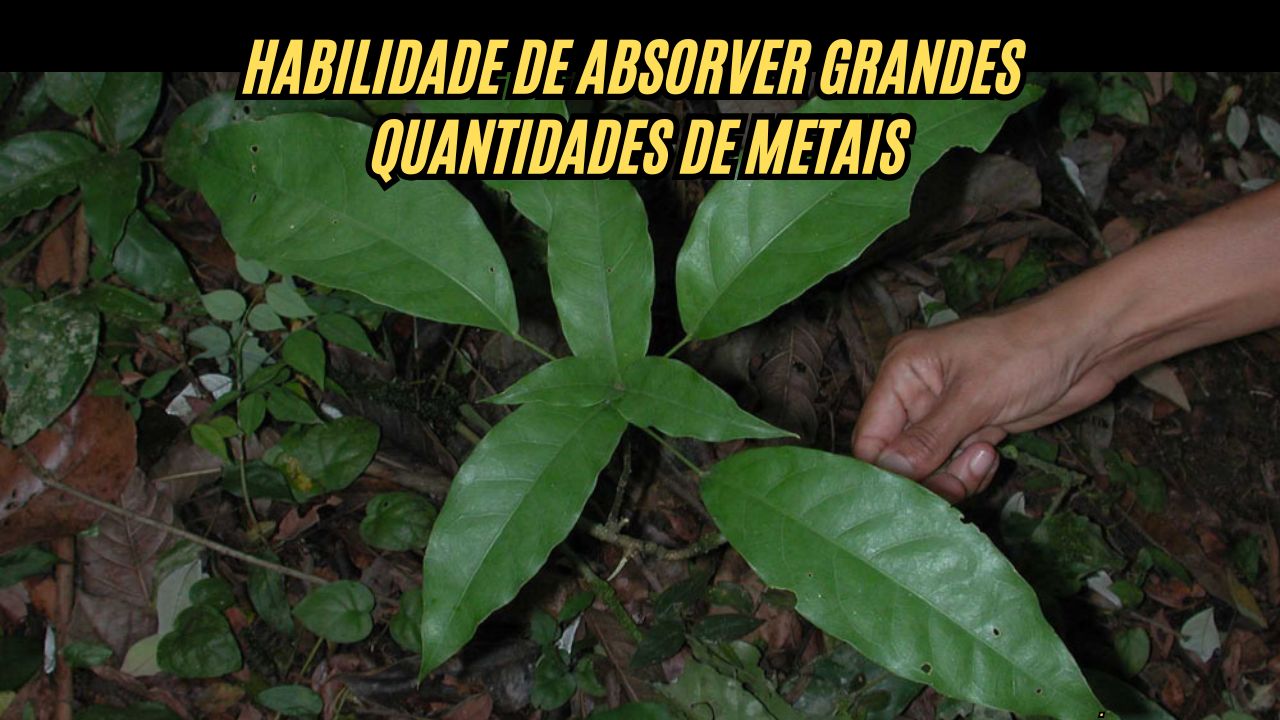
- Descoberta INÉDITA: Cientistas de Pernambuco encontram planta capaz de retirar metais pesados do solo e acumular até 10 vezes mais zinco do que o normal
- Por que os foguetes da NASA ejetam meio milhão de galões de água
- Aliens ou Ciência? Luzes misteriosas na Lua intrigam e Sergio Sacani explica o fenômeno que viralizou
- Mais de 1 BILHÃO de pessoas podem trocar seus celulares pela nova tecnologia da China: Um substituto de celular que funciona sem as mãos está chegando!
Em vez de tentar adaptar garras ou mãos tradicionais, os engenheiros se inspiraram na maneira como os seres humanos naturalmente formam ganchos com as mãos ao subir escadas.
A equipe desenvolveu patas em forma de gancho que podem se prender firmemente aos degraus, proporcionando uma pegada segura e estável. Além do hardware, o robô foi treinado para usar essas novas patas através de aprendizado por reforço, uma abordagem que utiliza simulação para ensinar o robô a subir escadas de maneira eficaz e rápida.
Esse método, chamado de paradigma professor-aluno, envolve um robô instrutor que ensina robôs alunos a enfrentar diferentes cenários de escalada.
Desempenho e testes no mundo real do robô de resgate
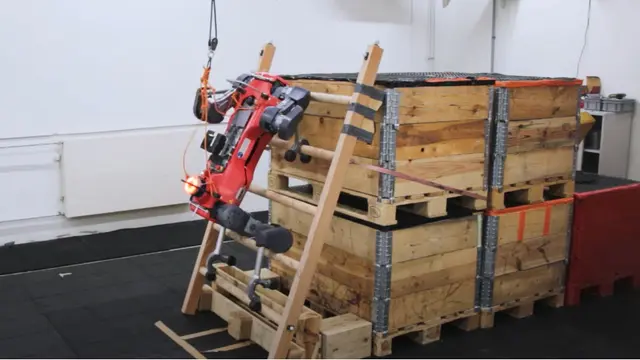
Após o treinamento, o ANYMal foi submetido a testes em escadas reais. Os resultados foram impressionantes: o robô alcançou uma taxa de sucesso de 90% ao subir escadas com ângulos variando de 70° a 90°. Isso representa uma melhoria significativa em relação a versões anteriores do ANYMal, que tinham dificuldades com esse tipo de terreno.
O design dos ganchos permitiu que o robô superasse escadas instáveis e mal colocadas, mantendo um desempenho consistente mesmo durante perturbações inesperadas.
Além disso, o ANYMal demonstrou uma escalada 232 vezes mais rápida do que o estado da arte anterior em robôs quadrúpedes. A robustez desse novo sistema é evidenciada por uma taxa de sucesso de 96% em simulações que incluíam terrenos difíceis e cenários gerados aleatoriamente.
Robôs Quadrúpedes e a escalada de escadas
A escalada de escadas tem sido um desafio para robôs quadrúpedes e humanoides. Enquanto os robôs com pernas geralmente são mais eficazes do que os robôs com rodas em terrenos irregulares, as escadas representam um obstáculo significativo.
A incapacidade de navegar em escadas limita a utilidade desses robôs em ambientes industriais e de resgate, onde escadas são comuns.
Pesquisas anteriores sobre escalada de robôs humanoides revelaram limitações em termos de velocidade e adaptabilidade a diferentes tipos de escadas.
Da mesma forma, os robôs quadrúpedes enfrentavam dificuldades para subir escadas verticais. A ETH Zurich superou esses desafios combinando o design inovador das patas em gancho com aprendizado por reforço, resultando em uma solução eficaz para a escalada em escadas.
Fisgado pelo sucesso
A abordagem de aprendizado por reforço usada pela ETH Zurich permitiu que o ANYMal se tornasse não apenas eficiente na escalada de escadas, mas também mais adaptável a diferentes condições.
Ao utilizar simulações extensivas com terrenos gerados aleatoriamente, os robôs alunos aprenderam a lidar com uma variedade de situações, desenvolvendo habilidades robustas de escalada de maneira mais rápida e eficiente.
Além dos testes no mundo real, a equipe planeja incorporar novos sensores, como câmeras de profundidade, para melhorar ainda mais a capacidade do ANYMal de subir e descer escadas. Isso abrirá novas possibilidades para o uso de robôs quadrúpedes em ambientes perigosos, como operações de resgate em áreas de difícil acesso.
Futuro das Operações com Robôs Quadrúpedes
Embora o design atual dos ganchos tenha se mostrado extremamente eficaz, a equipe de engenheiros da ETH Zurich reconhece que há espaço para melhorias. Pesquisas futuras buscarão aprimorar ainda mais o design dos ganchos e o controle do robô para melhorar seu desempenho em uma gama mais ampla de atividades.
Esse desenvolvimento representa um avanço significativo para o uso de robôs quadrúpedes em uma variedade de setores, incluindo inspeções industriais, operações de resgate e até mesmo missões em áreas de risco. Com uma mobilidade aprimorada, o ANYMal está um passo mais perto de se tornar uma ferramenta essencial em ambientes desafiadores.
Em suma, o sucesso do robô ANYMal em superar escadas com ganchos personalizados demonstra o poder do design inovador combinado com técnicas avançadas de aprendizado de máquina. À medida que a pesquisa continua a evoluir, o futuro da robótica parece promissor, com soluções cada vez mais adaptáveis e eficientes para enfrentar os desafios do mundo real.